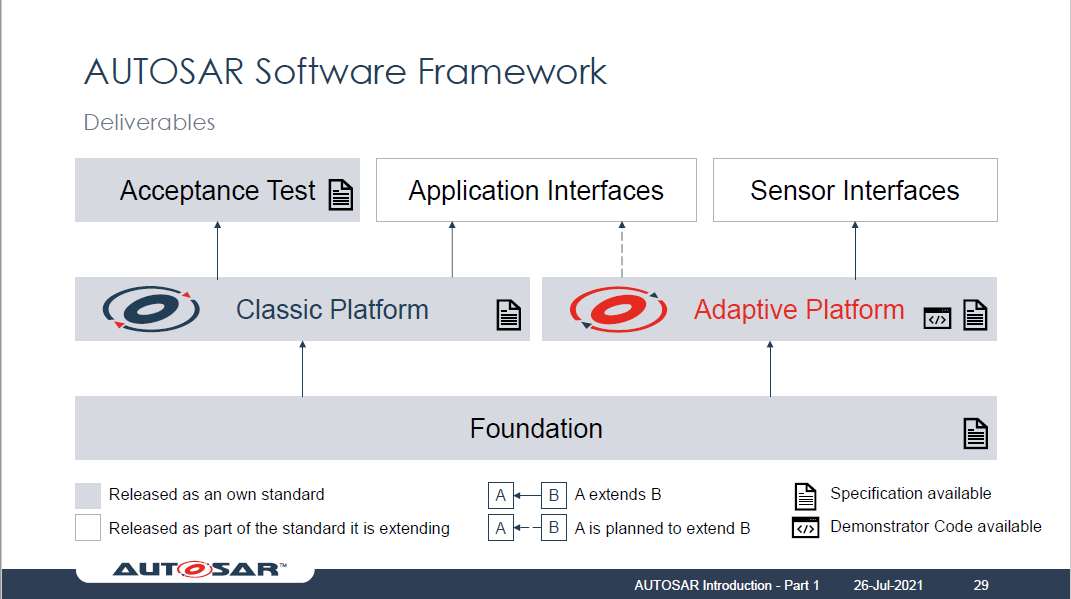
参考までに仕様の流れを図示したものは以下の通りです。
出典:https://www.autosar.org/fileadmin/user_upload/AUTOSAR_EXP_Introduction_Part1.pdf
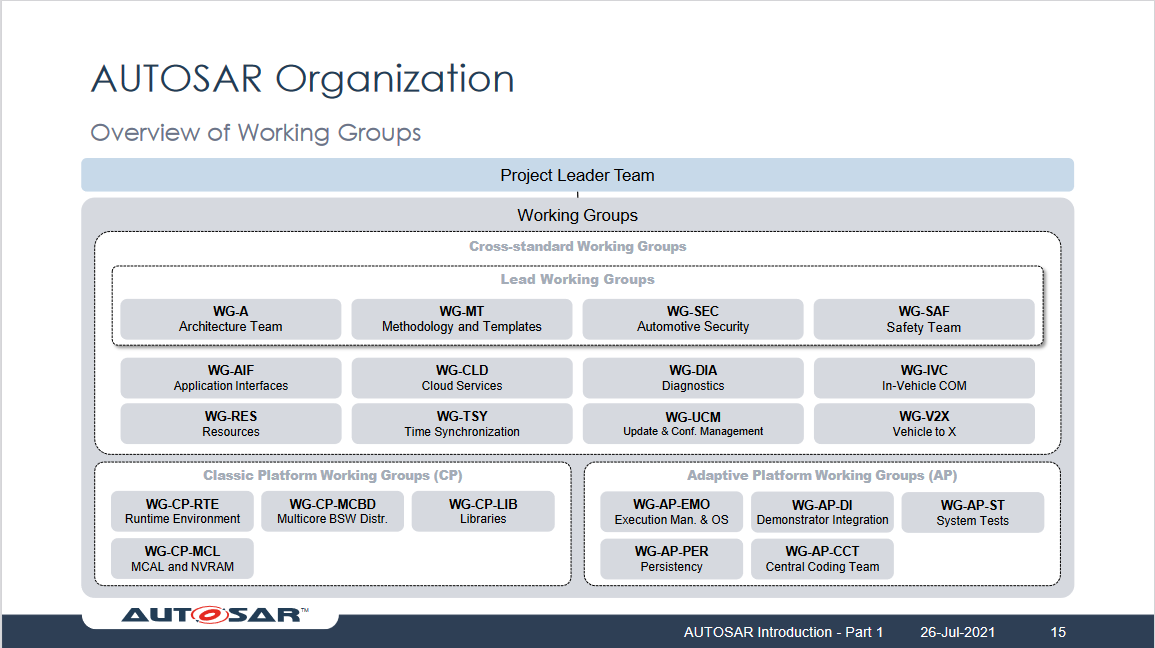
AUTOSAR Working Groupの組織図
AUTOSARの組織図は以下のようになっています。(2021年9月現在)
出典:https://www.autosar.org/fileadmin/user_upload/AUTOSAR_EXP_Introduction_Part1.pdf
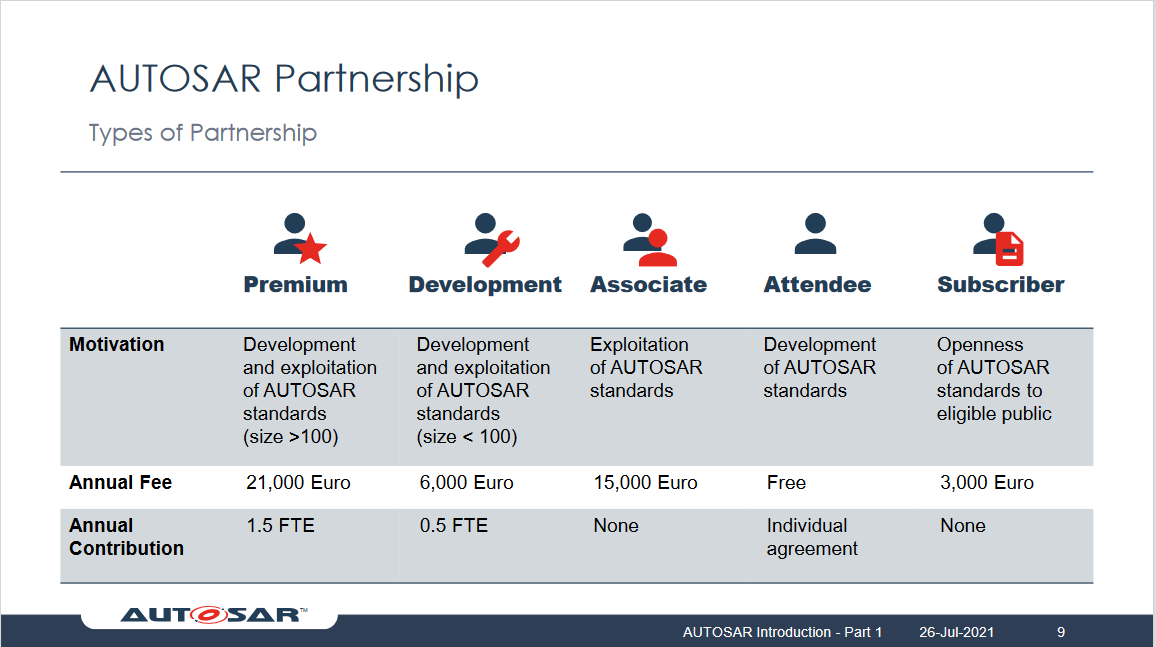
WGに参加するには?
AUTOSARのDevelopment Partner以上のパートナーシップに参加する必要があります。パートナーシップによってかかる金額や必要な貢献度が変わります。
出典:https://www.autosar.org/fileadmin/user_upload/AUTOSAR_EXP_Introduction_Part1.pdf
この表のAnnual ContributionがWGへの貢献度です。
例えば、Premiumの1.5FTEというのは、年間1.5人AUTOSARのWGに参加し、仕様策定に貢献するということになります。
システムテストの目的
システムテストの目的は「AUTOSARの仕様が正しいことをコードを用いて検証する」です。
各WGにて策定されたRS(Requirements)仕様がDemonstratorのコードを用いて動作し、仕様を満たしているか?を確認していきます。
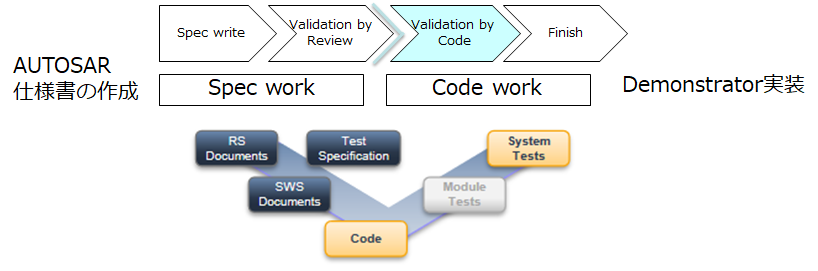
先に述べたようにAPにはDemonstrator実装も公開されています。これは仕様に基づいてAUTOSARが公式に実装したコードです。通称APDと呼ばれています。
システムテストチームではAUTOSARの各FC(Functional Cluster)のRSをベースにユースケースに基づいたテストケースを作成し「システムテスト仕様」を作成、さらにそのテストケースをDemonstrator実装を使って正しく動作するかを検証するための「テスト実装」を作成し、提供しています。
システムテストWGの活動内容
システムテストWGでは大きく分けて以下のような流れでテスト仕様の作成、実装を進めています。
テスト仕様作成フロー
●ソフトウェア要求(RS)解析
FCのソフトウェア要求(RS)を分析し、システムテストチームで対応すべきかどうかを判断します。すべてのRSを満たすことを目的としていないため、基準を設けて必要性を判断しています。
●ソフトウェア仕様(SWS)トレース分析
対象のRSから紐づくソフトウェア仕様(SWS)を分析します。トレース可能であればValidationSets(AUTOSAR内部で利用している機能検証の単位)と紐づけます。
●テスト仕様の記載
RS解析結果をもとに想定されるユースケースを作成し、それをベースにテストケースを作成します。テストケースは前提条件やコンフィグ項目、テストシナリオ、確認項目等で構成されます。
●テスト実装
テスト仕様をもとに、Demonstrator実装を使ってテストアプリケーションとテスターアプリケーションを実装します。詳細なテストアプリケーションの構成は後述します。
●テスト結果確認
実装したテストを実際のターゲットボードにデプロイし、ローカル環境でテスト結果を確認します。最終的なテスト結果はAUTOSARがオフィシャルに用意しているCI/CD環境にデプロイし、動作確認を行います。
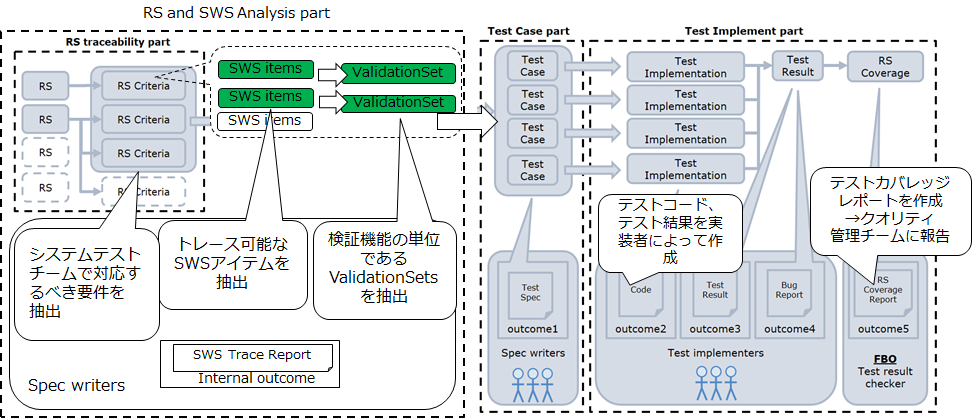
システムテストでは上記のフローの役割をFCごとに「RS解析、SWSトレース分析、テスト仕様の記載」までを「Spec Writer」、「テスト実装、テスト結果確認」までを「Test Implementor」が担当しています。
テストアプリケーションの構成
では、システムテストで実装しているアプリケーションはどのように構成されているのでしょうか。
下記にCM(Communication Management)のテスト構成を例に説明します。
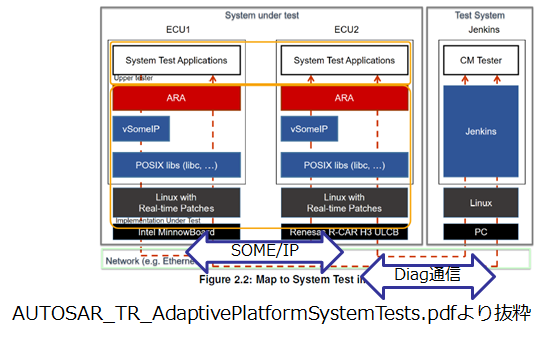
テストアプリケーションは「テスト対象アプリケーション」と「テスターアプリケーション」の2つで構成されます。
●テスト対象アプリケーション
ECU上で動作する、テスト対象のアプリケーションです。Demonstrator実装のSDKを使って特定のFCのAPIをコールしたり、SerivceベースのアプリケーションであればARXMLのコンフィグレーションをし、サービス同士のコミュニケーションを実現します。
アプリケーション内にはアプリケーションから出力されるテスト結果をテスターアプリケーションから得るためにDiag通信を用いたテストの受け口を用意しています。
●テスターアプリケーション
Google Test Frameworkを使ってテストシナリオを実装し、テスト対象のアプリケーションが正しく動作していることを確認するアプリケーションです。Demonstrator実装とは関係なく、シンプルなLinux上で動作するアプリケーションとして実装しています。
テスターアプリケーションはDiag通信経由でテストアプリケーションからテスト結果を取得し、テストシナリオが合格するかを確認します。